

~ 2000 / 2026 ~
// Documenti disponibili n: 47.499
// Documenti scaricati n: 38.436.132
// Documenti disponibili n: 47.499
// Documenti scaricati n: 38.436.132



















Estratto dall'Appendice A della Specifica Tecnica ISO/TS 15066:2016 Ed. 1.0
I robot collaborativi, sempre più diffusi, implementano applicazioni in cui le persone e sistemi robotizzati collaborano insieme, si possono ottenere vantaggi di produzione notevoli, ed anche vantaggi in termini di sicurezza (ergonomia in particolare), ad esempio miglioramenti della postura dell'operatore.
ISO 6385:2016
stabilisce i principi fondamentali di ergonomia come linee guida di base per la progettazione dei sistemi di lavoro e definisce termini di base rilevanti.
L'allegato all'articolo, estratto dall'Appendice A della ISO/TS 15066:2016 mette in evidenza quali sono i parametri di potenza e forza limite per il contatto tra robot collaborativo ed operatore, da considerare nella Valutazione del rischio.
Tali valori, provenienti da ricerche scientifiche, possono anche eventualmente essere utilizzati per stabilire soglie limite di forza per urti/contatto a danno dell'operatori durante il lavoro.
L'obiettivo dei robot collaborativi è di combinare le prestazioni ripetitiva del robot con lo competenze individuali e la capacità dell'uomo. L'uomo ha una eccellente capacità di risolvere esercizi imprecisi; i robot hanno capacità di precisione, potenza e resistenza. Per raggiungere la sicurezza, le applicazioni robotiche tradizionali, escludono l'accesso dell'operatore alla zona di lavoro del robot.
Pertanto, una serie di operazioni che richiedono l'intervento umano spesso non possono essere automatizzate utilizzando sistemi robotizzati.
La specifica tecnica ISO/15066 fornisce una guida per il funzionamento in sicurezza del robot collaborativo, in cui un sistema robot e operatore condividono lo stesso spazio di lavoro.
In tali operazioni, l'integrità del sistema di controllo di sicurezza è di grande importanza, in particolare quando vengono controllati i parametri di processo quali velocità e forza.
Una valutazione globale del rischio deve prendere in esame non solo il sistema robot stesso, ma anche l'ambiente in cui è collocato, cioè il posto di lavoro.
La Specifiche Tecnica ISO/TS 15066:2016 (prima edizione) supporta gli standard di sicurezza dei robot industriali ISO 10218-1 e ISO 10218-2, e fornisce ulteriori indicazioni sulle funzioni operative individuate per i robot collaborativi.
La ISO 10218-2:2011, in 5.11.5.5, richiede che i parametri di potenza, forza, e l'ergonomia di pertinenza dei sistemi robotizzati siano determinati da una valutazione del rischio.
Informazioni sulla progettazione del sistema robotico collaborativo è fornito in 5.4.4 della ISO/TS 15066.
Il presente allegato fornisce indicazioni su come stabilire, nelle applicazioni, i valori di soglia limite del sistema robot collaborativo, in particolare potenza e forza.
La premessa alla base di questo allegato è che i limiti del sistema di robot collaborativo possono essere calcolati sulla base di soglie di sensibilità al dolore dell'interfaccia uomo-macchina in situazioni in cui si verifica un contatto.
Questi valori soglia limite possono essere utilizzati per stabilire i valori di pressione e forza limite per le varie zone del corpo utilizzando un modello di corpo.
Questi dati possono essere estrapolati per impostare i limiti di trasferimento di energia a livello di interfaccia uomo/macchina.
I valori limite di velocità, se può verificarsi il contatto con un operatore ed un robot, dovrebbero mantenere i valori di forza e di pressione al di sotto della soglia di sensibilità al dolore.
I valori limite in questo allegato sono basati su stime conservative e sulla ricerca scientifica sulla sensazione al dolore.
La ISO/TS 15066 è intesa come uno strumento informativo per delineare un possibile metodo per gli integratori/fabbricanti, per impostare i limiti di potenza e di forza.
Il modello del corpo (A.2)
La valutazione dei rischi deve prevedere che nelle applicazioni di robot collaborativi può verificarsi un contatto accidentale tra le parti del sistema robotico collaborativo e l'operatore.
Una prima considerazione nella valutazione del rischio è quello di determinare in quale parte del corpo è probabile che si verifichi un contatto tra il robot e l'operatore.
Questo è fondamentale dal momento che diverse aree del corpo avranno diverse soglie per sopportare il carico biomeccanico senza incorrere in lesioni lievi.
Ai fini della presente specifica, è stato creato un modello del corpo suddiviso in 29 specifiche aree del corpo stesso classificate in regioni 12 del corpo.
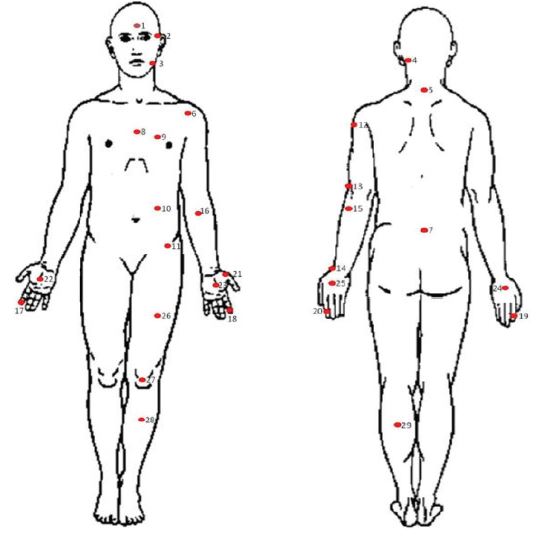
Fig. 1
La Figura 1 mostra le 29 aree di contatto del corpo, mentre Tabella A.1 mostra le 12 regioni specifiche del corpo, classificate in regioni generali del corpo, parte anteriore o posteriore del corpo in relazione alle stesse.
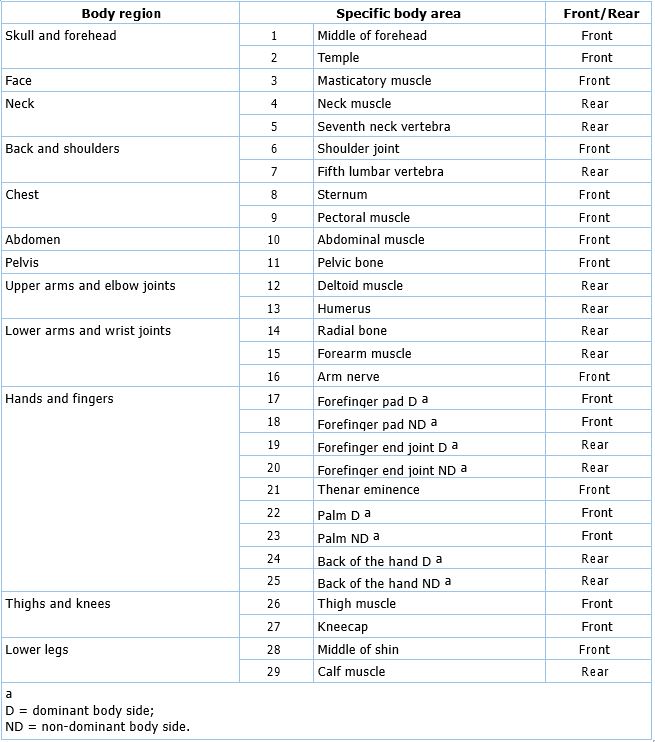
Tabella A.1
segue
Fonte:
ISO/TS 15066:2016
Robots and robotic devices - Collaborative robots
Elaborato Certifico Srl - IT 2016
ID 25120 | 14.12.2025 / Preview Allegato
UNI EN ISO 13997:2025 - Proprietà meccaniche - Determinazione della ...

ID 21708 | 18.04.2024 / In allegato Preview
UNI/TR 11950:2024 Sicurezza e salute nell'uso degli esoscheletri occupazionali orientati ad agevolare le atti...
Testata editoriale iscritta al n. 22/2024 del registro periodici della cancelleria del Tribunale di Perugia in data 19.11.2024
